本文原创
最短路问题乃图论经典问题之一,著名的算法有Dijkstra、Bellman-Ford、Floyd-Warshall等,而求第K短路径的最为经典的算法由JIN Y. YEN于1971年在其论文《Finding The K Shortest Loopless Paths In A Network》中提出,对于权值严格非负图,其算法的时间复杂度上限为K*N^3/2,空间复杂度为N^2 + KN。
在Ernesto Q.V. Martins和Marta M.B. Pascoal合著的论文《A new implementation of Yen’s ranking loopless paths algorithm》中,他们对Yen氏算法进行了优化改进,论文中的算法伪代码如下:
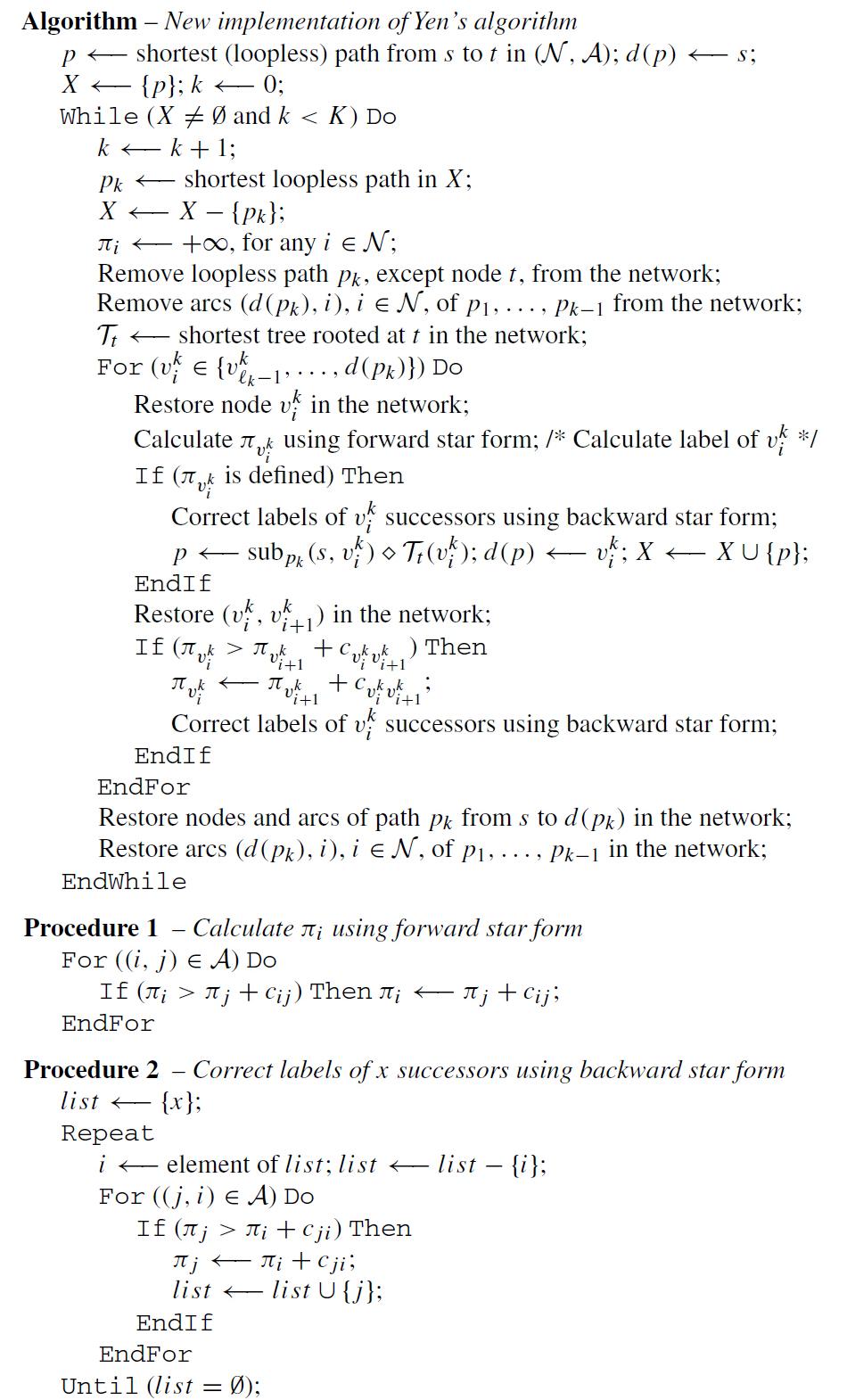
本文以邻接表的存储形式对上述算法进行了实现,实现中调用了Dijkstra算法,实现中还构建了反向图,相关源代码摘录如下,首先是结点和边以及路径解的存储形式:
class Arc
{
public:
Arc() : ArcID(0), SourceID(0), DestinationID(0), cost(INF), nextArc(NULL) {}
int ArcID; //
int SourceID; //
int DestinationID; //
int cost;
Arc *nextArc;
};
class rArc // For Yen's kShortestPath
{
public:
rArc() : ArcID(0), SourceID(0), DestinationID(0), cost(INF), nextArc(NULL) {}
int ArcID; //
int SourceID; //
int DestinationID; //
int cost;
rArc *nextArc;
};
class Node
{
public:
Node() : ID(0), firstArc(NULL) {}
int ID;
vector<Arc*> previous; // For Yen's kShortestPath
Arc *firstArc;
};
class rNode // For Yen's kShortestPath
{
public:
rNode() : ID(0), firstArc(NULL) {}
int ID;
vector<rArc*> previous; // For Yen's kShortestPath
rArc *firstArc;
};
class Path
{
public:
Path(int d) : costSum(0), deviation(d), deviationFromWhichPath(0) {}
Path& operator=(const Path& rhs)
{
nodePath.assign(rhs.nodePath.begin(), rhs.nodePath.end());
arcPath.assign(rhs.arcPath.begin(), rhs.arcPath.end());
costSum = rhs.costSum;
deviation = rhs.deviation;
deviationFromWhichPath = rhs.deviationFromWhichPath;
return *this;
}
vector<int> nodePath;
vector<int> arcPath;
int costSum;
int deviation;
int deviationFromWhichPath;
};
bool pathCmp(const Path* lhs, const Path* rhs)
{
if (lhs->costSum == rhs->costSum)
{
if (lhs->nodePath.size() == rhs->nodePath.size())
return lhs->deviationFromWhichPath < rhs->deviationFromWhichPath;
return lhs->nodePath.size() < rhs->nodePath.size();
}
return lhs->costSum < rhs->costSum;
}
针对正向图和反向图的Dijkstra算法,及其路径的记录函数:
void dijkstra(Node *NodeList, int NodeNum, int SourceID)
{
int i, u, v;
// set<int> S;
priority_queue<pair<int, int>, vector<pair<int, int> >, cmp > priorityQ;
for (i = 0; i < NodeNum; i++) { if (SourceID != i) { dist[i] = INF; pi[i] = NULL; } } dist[SourceID] = 0; pi[SourceID] = 0; arcRecord[SourceID] = 0; priorityQ.push(make_pair(SourceID, 0)); while (priorityQ.empty() != true) { u = priorityQ.top().first; priorityQ.pop(); // S.insert(u); Arc *parc; parc = NodeList[u].firstArc; while (parc != NULL) { v = parc->DestinationID;
if (dist[v] > dist[u] + parc->cost)
{
dist[v] = dist[u] + parc->cost;
pi[v] = u;
arcRecord[v] = parc->ArcID;
priorityQ.push(make_pair(v, dist[v]));
}
parc = parc->nextArc;
}
}
}
void rDijkstra(rNode *rNodeList, int *Pi, int NodeNum, int SourceID)
{
int i, u, v;
// set<int> S;
priority_queue<pair<int, int>, vector<pair<int, int> >, cmp > priorityQ;
for (i = 0; i < NodeNum; i++) if (SourceID != i) { Pi[i] = INF; pi[i] = NULL; } Pi[SourceID] = 0; pi[SourceID] = 0; arcRecord[SourceID] = 0; priorityQ.push(make_pair(SourceID, 0)); while (priorityQ.empty() != true) { u = priorityQ.top().first; priorityQ.pop(); // S.insert(u); rArc *rparc; rparc = rNodeList[u].firstArc; while (rparc != NULL) { v = rparc->DestinationID;
if (Pi[v] > Pi[u] + rparc->cost)
{
Pi[v] = Pi[u] + rparc->cost;
pi[v] = u;
arcRecord[v] = rparc->ArcID;
priorityQ.push(make_pair(v, Pi[v]));
}
rparc = rparc->nextArc;
}
}
}
void recordDirectRouteForNode(vector<int>& route, int *path, int src, int dst, bool pop_back = true)
{
stack<int> S;
while (dst != src)
{
S.push(dst);
dst = path[dst];
}
S.push(dst);
while (S.empty() != true)
{
route.push_back(S.top());
S.pop();
}
if (pop_back == true)
route.pop_back();
}
void recordDirectRouteForArc(vector<int>& route, int *path, int* pathHelper, int src, int dst)
{
stack<int> S;
int temp;
while (dst != src)
{
temp = dst;
dst = path[dst];
S.push(dst);
dst = pathHelper[temp];
}
while (S.empty() != true)
{
route.push_back(S.top());
S.pop();
}
}
然后是论文中提到的Correct labels of v_i^k successors using backward star form:
void correctLabels(Node *NodeList, int *Pi, int v_i_k, vector<bool>& isRemoved)
{
unsigned int i;
queue<int> Q;
Q.push(v_i_k);
int x;
do
{
x = Q.front();
Q.pop();
int priv;
for (i = 0; i < NodeList[x].previous.size(); i++) { priv = NodeList[x].previous[i]->SourceID;
if (isRemoved[priv] == true) // skip removed node to save time
continue;
if (Pi[priv] > Pi[x] + NodeList[x].previous[i]->cost)
{
Pi[priv] = Pi[x] + NodeList[x].previous[i]->cost; // pi_j <-- pi_i + c_{ji}
Q.push(priv); // list <-- list U {j}
}
}
}
while (Q.empty() != true);
}
void correctLabelsReverseGraph(rNode *rNodeList, int *Pi, int v_i_k, vector<bool>& isRemoved)
{
queue<int> Q;
Q.push(v_i_k);
int x;
do
{
x = Q.front();
Q.pop();
rArc *rparc = rNodeList[x].firstArc;
while (rparc != NULL)
{
if (isRemoved[rparc->DestinationID] == true) // skip removed node to save time
{
rparc = rparc->nextArc;
continue;
}
if (Pi[rparc->DestinationID] > Pi[x] + rparc->cost)
{
Pi[rparc->DestinationID] = Pi[x] + rparc->cost; // pi_j <-- pi_i + c_{ji} Q.push(rparc->DestinationID); // list <-- list U {j} } rparc = rparc->nextArc;
}
}
while (Q.empty() != true);
}
最后的重头戏来啦,直接可调用的函数,输入正向图和反向图以及源点和终点,路径就存放在传入的path中啦:
void kShortestPath(Path& path, Node *NodeList, rNode *rNodeList, int NodeNum, int src, int dst, map<int, int>& arcID2Cost, unsigned int K = 1)
{
dijkstra(NodeList, NodeNum, src);
recordNodeRouteForYen(path, pi, src, dst);
recordArcRouteForYen(path, arcRecord, pi, src, dst, arcID2Cost);
if (K == 1)
return;
unsigned int i, j;
unsigned int k = 1;
int *Pi = new int[NodeNum];
vector<bool> isRemoved;
vector<bool> is_in_d;
for (i = 0; i < (unsigned int)NodeNum; i++)
{
isRemoved.push_back(false);
is_in_d.push_back(false);
}
bool (*path_func_ptr)(const Path*, const Path*) = pathCmp;
set<Path*, bool (*)(const Path*, const Path*)> X(path_func_ptr);
X.insert(&path);
set<int> *determinedStartingArcs = new set<int>[NodeNum];
vector<int> nodePathTemp;
vector<int> nodePath_t_2_v_i_k, arcPath_t_2_v_i_k;; // store path Tt(v_i^k)
vector<Path*> erasedPath;
for (i = 0; i < K-1; i++)
erasedPath.push_back(new Path(src));
Path path_k(src);
int *d_p_k = new int[K];
int deviationFrom;
// =============== While (X != empty and k < K) Do ===============
while (X.empty() != true && k < K)
{
d_p_k[k-1] = (*X.begin())->deviation; // d_p_k[0] is src, for "d.insert(make_pair(&path, src));"
path_k = **X.begin(); // p_k <-- shortest loopless path in X
X.erase(X.begin()); // X <-- X - {p_k}
*erasedPath[k-1] = path_k; // erasedPath[k-1] is the k Shortest Path
path = path_k;
// ========== Remove loopless path pk, except node t, from the network ==========
Arc *parc = NULL, *qarc = NULL;
rArc *rparc = NULL, *rqarc = NULL;
for (i = 0; i < path_k.nodePath.size()-1; i++) // size()-1 due to except node t
{
int removing = path_k.nodePath[i];
// forward graph, out-degree
parc = NodeList[removing].firstArc;
while (parc != NULL)
{
parc->cost = INF; // equivalent to remove from the network
parc = parc->nextArc;
}
// forward graph, in-degree
for (j = 0; j < NodeList[removing].previous.size(); j++)
{
qarc = NodeList[removing].previous[j];
qarc->cost = INF;
}
// reverse graph, out-degree
rparc = rNodeList[removing].firstArc;
while (rparc != NULL)
{
rparc->cost = INF; // equivalent to remove from the network
rparc = rparc->nextArc;
}
// reverse graph, in-degree
for (j = 0; j < rNodeList[removing].previous.size(); j++)
{
rqarc = rNodeList[removing].previous[j];
rqarc->cost = INF;
}
isRemoved[removing] = true;
}
// ========== Remove arc(d(p_k), i), i in N, of p1, ..., p_{k-1} from the network ==========
if (k != 1)
{
for (i = 0; i < k-1; i++)
{
for (j = 0; j < erasedPath[i]->nodePath.size() && j < path_k.nodePath.size(); j++)
{
if (erasedPath[i]->nodePath[j] != path_k.nodePath[j])
{
deviationFrom = path_k.nodePath[j-1];
break;
}
}
if (j != erasedPath[i]->nodePath.size() && j != path_k.nodePath.size())
determinedStartingArcs[deviationFrom].insert(erasedPath[i]->nodePath[j]);
}
}
// ========== Tt <-- shortest tree rooted at t in the network ==========
rDijkstra(rNodeList, Pi, NodeNum, dst);
// ========== For (v_i^k in { v_{l_k-1}^k, ..., d(p_k)}) Do ==========
nodePathTemp.assign(path_k.nodePath.begin(), path_k.nodePath.end());
int v_i_k, v_ip1_k; // v_ip1_k is v_{i+1}^k
v_ip1_k = nodePathTemp.back();
nodePathTemp.pop_back();
do
{
v_i_k = nodePathTemp.back();
nodePathTemp.pop_back();
// ========== Restore node v_i^k in the network ==========
// forward graph, out-degree
parc = NodeList[v_i_k].firstArc;
while (parc != NULL)
{
// when analysing d(p_k) the arcs starting in d(p_k) which belong to other loopless paths already determined should not be used.
if (is_in_d[v_i_k] == true && determinedStartingArcs[v_i_k].count(parc->DestinationID) != 0) // this arc has belong to another loopless path
{
parc = parc->nextArc;
continue;
}
if (parc->DestinationID != v_ip1_k && isRemoved[parc->DestinationID] == false) // arc (v_i^k, v_{i+1}^k) restore after
{
parc->cost = arcID2Cost.at(parc->ArcID); // equivalent to restore in the network
if (Pi[v_i_k] > Pi[parc->DestinationID] + parc->cost)
Pi[v_i_k] = Pi[parc->DestinationID] + parc->cost; // Calculate pi_{v_i^k} using forward star form
}
parc = parc->nextArc;
}
// forward graph, in-degree
for (i = 0; i < NodeList[v_i_k].previous.size(); i++)
{
qarc = NodeList[v_i_k].previous[i];
if (isRemoved[qarc->SourceID] == false)
qarc->cost = arcID2Cost.at(qarc->ArcID); // equivalent to restore in the network
}
// reverse graph, out-degree
rparc = rNodeList[v_i_k].firstArc;
while (rparc != NULL)
{
if (isRemoved[rparc->DestinationID] == false)
rparc->cost = arcID2Cost.at(rparc->ArcID);
rparc = rparc->nextArc;
}
// reverse graph, in-degree
for (i = 0; i < rNodeList[v_i_k].previous.size(); i++)
{
rqarc = rNodeList[v_i_k].previous[i];
// when analysing d(p_k) the arcs starting in d(p_k) which belong to other loopless paths already determined should not be used.
if (is_in_d[v_i_k] == true && determinedStartingArcs[v_i_k].count(rqarc->SourceID) != 0) // this arc has belong to another loopless path
continue;
if (rqarc->SourceID != v_ip1_k && isRemoved[rqarc->SourceID] == false) // arc (v_i^k, v_{i+1}^k) restore after
{
rqarc->cost = arcID2Cost.at(rqarc->ArcID); // equivalent to restore in the network
if (Pi[v_i_k] > Pi[rqarc->SourceID] + rqarc->cost)
Pi[v_i_k] = Pi[rqarc->SourceID] + rqarc->cost; // Calculate pi_{v_i^k} using forward star form
}
}
isRemoved[v_i_k] = false; // Restore node v_i^k in the network
// ========== If (pi_{v_i^k} is defined) Then ==========
if (Pi[v_i_k] != INF)
{
// ===== Correct labels of v_i^k successors using backward star form =====
correctLabels(NodeList, Pi, v_i_k, isRemoved);
correctLabelsReverseGraph(rNodeList, Pi, v_i_k, isRemoved);
// ===== p <-- sub_{p_k}(s, v_i^k) square T_t(v_i^k) =====
rDijkstra(rNodeList, Pi, NodeNum, dst);
recordDirectRouteForNode(nodePath_t_2_v_i_k, pi, dst, v_i_k, false);
recordDirectRouteForArc(arcPath_t_2_v_i_k, arcRecord, pi, dst, v_i_k);
for (i = path.nodePath.size()-1; ; i--)
{
if (path.nodePath[i] == v_i_k)
break;
path.nodePath.pop_back();
path.arcPath.pop_back();
}
for (i = nodePath_t_2_v_i_k.size()-1; i > 0; i--)
{
path.nodePath.push_back(nodePath_t_2_v_i_k[i-1]);
path.arcPath.push_back(arcPath_t_2_v_i_k[i-1]);
}
// ===== d(p) <-- v_i^k =====
is_in_d[v_i_k] = true;
nodePath_t_2_v_i_k.clear();
arcPath_t_2_v_i_k.clear();
// X <-- X U {p}
path.costSum = 0;
for (i = 0; i < path.arcPath.size(); i++)
path.costSum += arcID2Cost.at(path.arcPath[i]);
path.deviation = v_i_k;
path.deviationFromWhichPath = k - 1;
Path *newPath = new Path(src);
*newPath = path;
X.insert(newPath);
} // EndIf
// ========== Restore (v_i^k, v_{i+1}^k) in the network ==========
// forward graph, out-degree
parc = NodeList[v_i_k].firstArc;
while (parc != NULL)
{
if (parc->DestinationID == v_ip1_k) // now, arc (v_i^k, v_{i+1}^k) restore
{
parc->cost = arcID2Cost.at(parc->ArcID); // equivalent to restore in the network
if (Pi[v_i_k] > Pi[v_ip1_k] + parc->cost)
Pi[v_i_k] = Pi[v_ip1_k] + parc->cost; // Calculate pi_{v_i^k} using forward star form
// Correct labels of v_i^k successors using backward star form
correctLabels(NodeList, Pi, v_i_k, isRemoved);
break;
}
parc = parc->nextArc;
}
// reverse graph, in-degree
for (i = 0; i < rNodeList[v_i_k].previous.size(); i++)
{
rqarc = rNodeList[v_i_k].previous[i];
if (rqarc->SourceID == v_ip1_k) // now, arc (v_i^k, v_{i+1}^k) restore
{
rqarc->cost = arcID2Cost.at(rqarc->ArcID); // equivalent to restore in the network
correctLabelsReverseGraph(rNodeList, Pi, v_i_k, isRemoved);
break;
}
}
v_ip1_k = v_i_k;
}
while (v_i_k != d_p_k[k-1]); // EndFor
// ========== Restore nodes and arcs of path p_k from s to d(p_k) in the network ==========
for (i = 0; i < path_k.nodePath.size(); i++) // sub_{p_k}(s, v_i^k), because d[k] = v_i^k
{
int restoring = path_k.nodePath[i];
if (isRemoved[restoring] == false) // if it has been restored, skip it to save time
continue;
// forward graph, out-degree
parc = NodeList[restoring].firstArc;
while (parc != NULL)
{
parc->cost = arcID2Cost.at(parc->ArcID); // equivalent to restore in the network
parc = parc->nextArc;
}
// forward graph, in-degree
for (j = 0; j < NodeList[restoring].previous.size(); j++)
{
qarc = NodeList[restoring].previous[j];
qarc->cost = arcID2Cost.at(qarc->ArcID); // equivalent to restore in the network
}
// reverse graph, out-degree
rparc = rNodeList[restoring].firstArc;
while (rparc != NULL)
{
rparc->cost = arcID2Cost.at(rparc->ArcID); // equivalent to restore in the network
rparc = rparc->nextArc;
}
// reverse graph, in-degree
for (j = 0; j < rNodeList[restoring].previous.size(); j++)
{
rqarc = rNodeList[restoring].previous[j];
rqarc->cost = arcID2Cost.at(rqarc->ArcID); // equivalent to restore in the network
}
isRemoved[restoring] = false;
}
// ========== Restore arcs (d(p_k), i), i in N, of p_1, ..., p_{k-1} in the network ==========
if (k != 1)
{
for (i = 0; i < k-1; i++)
{
for (j = 0; j < erasedPath[i]->nodePath.size() && j < path_k.nodePath.size(); j++)
{
if (erasedPath[i]->nodePath[j] != path_k.nodePath[j])
{
deviationFrom = path_k.nodePath[j-1];
break;
}
}
if (j != erasedPath[i]->nodePath.size() && j != path_k.nodePath.size())
determinedStartingArcs[deviationFrom].erase(erasedPath[i]->nodePath[j]);
}
}
// ========== Restore arcs starting in d(p_k) which belong to other loopless paths in the network ==========
nodePathTemp.assign(path_k.nodePath.begin(), path_k.nodePath.end());
v_ip1_k = nodePathTemp.back();
nodePathTemp.pop_back();
do
{
v_i_k = nodePathTemp.back();
nodePathTemp.pop_back();
// forward graph, out-degree
parc = NodeList[v_i_k].firstArc;
while (parc != NULL)
{
if (parc->DestinationID != v_ip1_k && isRemoved[parc->DestinationID] == false) // arc (v_i^k, v_{i+1}^k) restore after
parc->cost = arcID2Cost.at(parc->ArcID); // equivalent to restore in the network
parc = parc->nextArc;
}
// reverse graph, in-degree
for (i = 0; i < rNodeList[v_i_k].previous.size(); i++)
{
rqarc = rNodeList[v_i_k].previous[i];
if (rqarc->SourceID != v_ip1_k && isRemoved[rqarc->SourceID] == false) // arc (v_i^k, v_{i+1}^k) restore after
rqarc->cost = arcID2Cost.at(rqarc->ArcID); // equivalent to restore in the network
}
v_ip1_k = v_i_k;
}
while (v_i_k != d_p_k[k-1]); // EndFor
k++;
}
path = **X.begin();
for (set<Path*, bool (*)(const Path*, const Path*)>::iterator its = X.begin(); its != X.end(); ++its)
delete *its;
X.erase(X.begin(), X.end());
for (vector<Path*>::iterator itv = erasedPath.begin(); itv != erasedPath.end(); ++itv)
delete *itv;
erasedPath.clear();
delete []determinedStartingArcs;
delete []d_p_k;
delete []Pi;
}
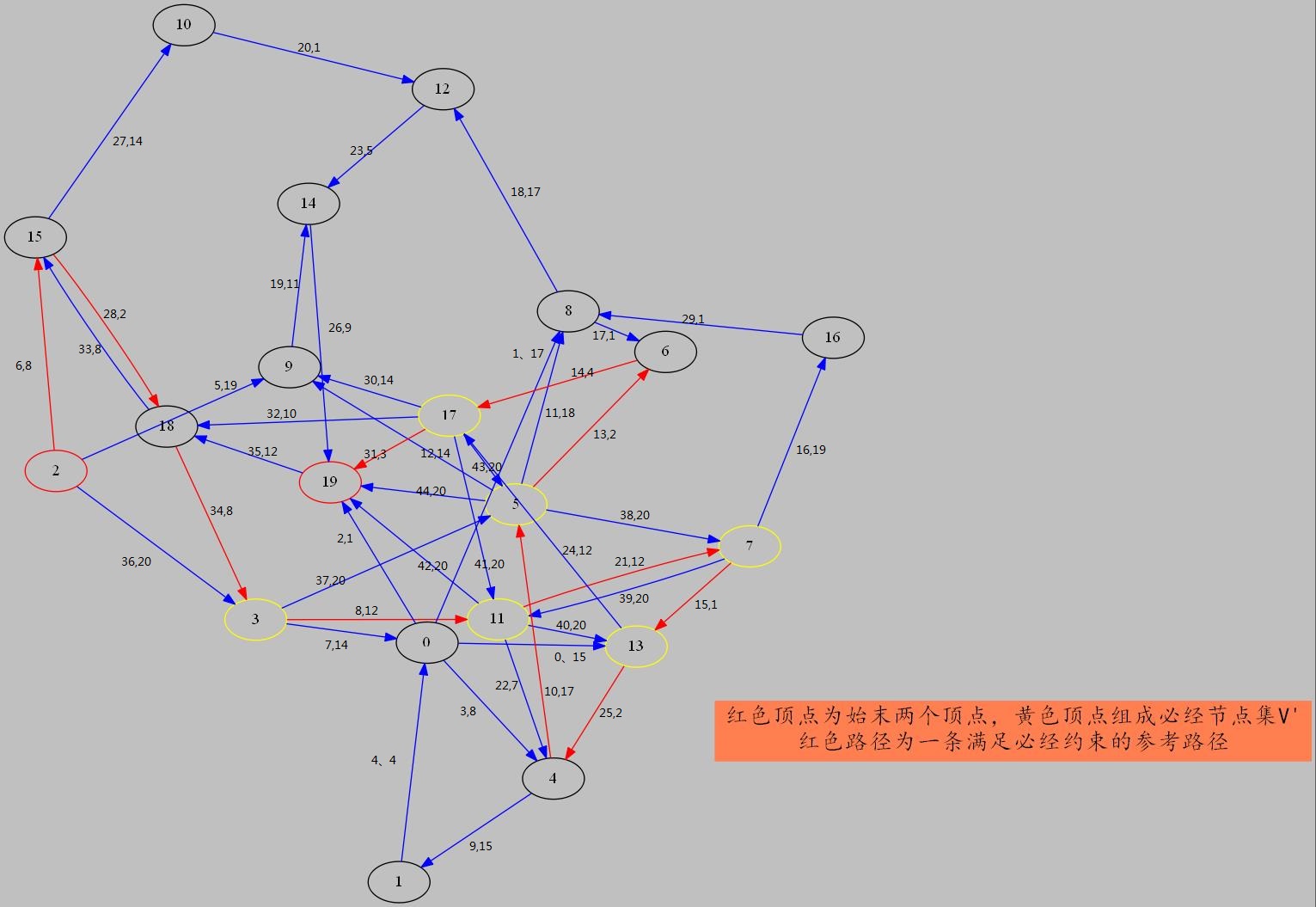
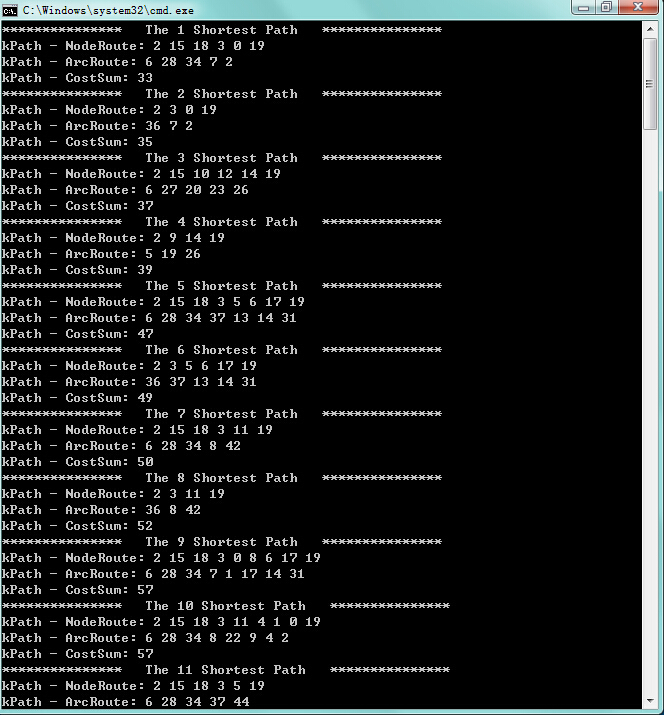
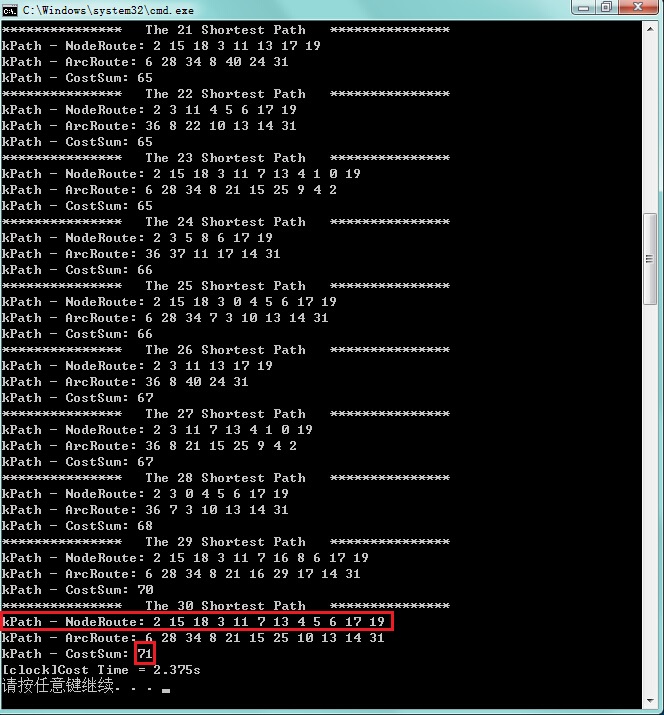
针对下图的测试结果如下:
至于正向图和方向图的构建在此给个参考,知道其中值的存储形式就很容易进行移植:
// 3. ========== construct graph ==========
sort(AllUnion.begin(), AllUnion.end(), sourceCompare);
Node *NodeList = new Node[NodeNum];
unsigned int NodeId = 0;
unsigned int rank = 2;
Arc *firstarc = new Arc, *parc, *qarc;
firstarc->ArcID = AllUnion[0].second.first;
firstarc->SourceID = AllUnion[0].first.first;
firstarc->DestinationID = AllUnion[0].first.second;
firstarc->cost = AllUnion[0].second.second;
firstarc->nextArc = NULL;
NodeId = AllUnion[0].first.first; // node index start with 0
arcIsAdded[NodeId] = true;
NodeList[NodeId].ID = nodeIndex2ID.at(firstarc->SourceID);
NodeList[NodeId].firstArc = firstarc;
NodeList[firstarc->DestinationID].previous.push_back(firstarc);
for (i = 1; i < ArcNum; i++)
{
if (AllUnion[i].first.first == AllUnion[i-1].first.first)
{
if (rank % 2 == 0)
{
parc = new Arc;
parc->ArcID = AllUnion[i].second.first;
parc->SourceID = AllUnion[i].first.first;
parc->DestinationID = AllUnion[i].first.second;
parc->cost = AllUnion[i].second.second;
parc->nextArc = NULL;
if (rank == 2)
firstarc->nextArc = parc;
else
qarc->nextArc = parc;
NodeList[parc->DestinationID].previous.push_back(parc);
}
else
{
qarc = new Arc;
qarc->ArcID = AllUnion[i].second.first;
qarc->SourceID = AllUnion[i].first.first;
qarc->DestinationID = AllUnion[i].first.second;
qarc->cost = AllUnion[i].second.second;
qarc->nextArc = NULL;
parc->nextArc = qarc;
NodeList[qarc->DestinationID].previous.push_back(qarc);
}
rank++;
}
else
{
rank = 2;
NodeId = AllUnion[i].first.first;
arcIsAdded[NodeId] = true;
firstarc = new Arc;
firstarc->ArcID = AllUnion[i].second.first;
firstarc->SourceID = NodeId;
firstarc->DestinationID = AllUnion[i].first.second;
firstarc->cost = AllUnion[i].second.second;
firstarc->nextArc = NULL;
NodeList[NodeId].ID = nodeIndex2ID.at(NodeId);
NodeList[NodeId].firstArc = firstarc;
NodeList[firstarc->DestinationID].previous.push_back(firstarc);
}
}
for (i = 0; i < NodeNum; i++)
{
if (arcIsAdded[i] == false)
{
NodeList[i].ID = nodeIndex2ID.at(i);
NodeList[i].firstArc = NULL;
}
}
// 4. ========== construct reverse graph ==========
sort(AllUnion.begin(), AllUnion.end(), terminalCompare);
for (i = 0; i < NodeNum; i++)
arcIsAdded[i] = false;
NodeId = 0;
rank = 2;
rNode *rNodeList = new rNode[NodeNum];
rArc *rfirstarc = new rArc, *rparc, *rqarc;
rfirstarc->ArcID = AllUnion[0].second.first;
rfirstarc->SourceID = AllUnion[0].first.second;
rfirstarc->DestinationID = AllUnion[0].first.first;
rfirstarc->cost = AllUnion[0].second.second;
rfirstarc->nextArc = NULL;
NodeId = AllUnion[0].first.second; // NodeId ?= 0, maybe not
arcIsAdded[NodeId] = true;
rNodeList[NodeId].ID = nodeIndex2ID.at(rfirstarc->SourceID);
rNodeList[NodeId].firstArc = rfirstarc;
rNodeList[rfirstarc->DestinationID].previous.push_back(rfirstarc);
for (i = 1; i < ArcNum; i++)
{
if (AllUnion[i].first.second == AllUnion[i-1].first.second)
{
if (rank % 2 == 0)
{
rparc = new rArc;
rparc->ArcID = AllUnion[i].second.first;
rparc->SourceID = AllUnion[i].first.second;
rparc->DestinationID = AllUnion[i].first.first;
rparc->cost = AllUnion[i].second.second;
rparc->nextArc = NULL;
if (rank == 2)
rfirstarc->nextArc = rparc;
else
rqarc->nextArc = rparc;
rNodeList[rparc->DestinationID].previous.push_back(rparc);
}
else
{
rqarc = new rArc;
rqarc->ArcID = AllUnion[i].second.first;
rqarc->SourceID = AllUnion[i].first.second;
rqarc->DestinationID = AllUnion[i].first.first;
rqarc->cost = AllUnion[i].second.second;
rqarc->nextArc = NULL;
rparc->nextArc = rqarc;
rNodeList[rqarc->DestinationID].previous.push_back(rqarc);
}
rank++;
}
else
{
rank = 2;
NodeId = AllUnion[i].first.second;
arcIsAdded[NodeId] = true;
rfirstarc = new rArc;
rfirstarc->ArcID = AllUnion[i].second.first;
rfirstarc->SourceID = NodeId;
rfirstarc->DestinationID = AllUnion[i].first.first;
rfirstarc->cost = AllUnion[i].second.second;
rfirstarc->nextArc = NULL;
rNodeList[NodeId].ID = nodeIndex2ID.at(NodeId);
rNodeList[NodeId].firstArc = rfirstarc;
rNodeList[rfirstarc->DestinationID].previous.push_back(rfirstarc);
}
}
for (i = 0; i < NodeNum; i++)
{
if (arcIsAdded[i] == false)
{
rNodeList[i].ID = nodeIndex2ID.at(i);
rNodeList[i].firstArc = NULL;
}
}